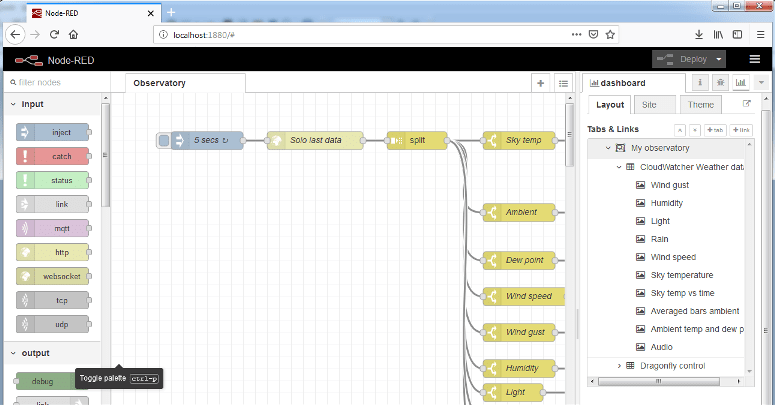
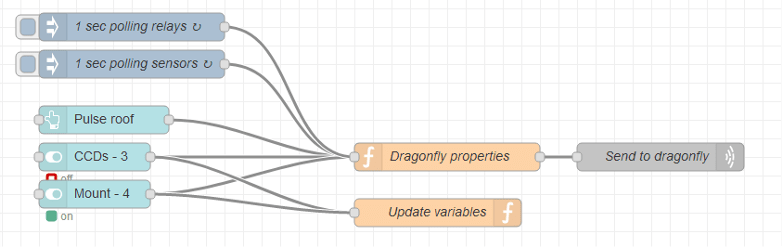

We receive whatever the Dragonfly sends (UDP port 10000), and divide it between sensor information, and relay information.
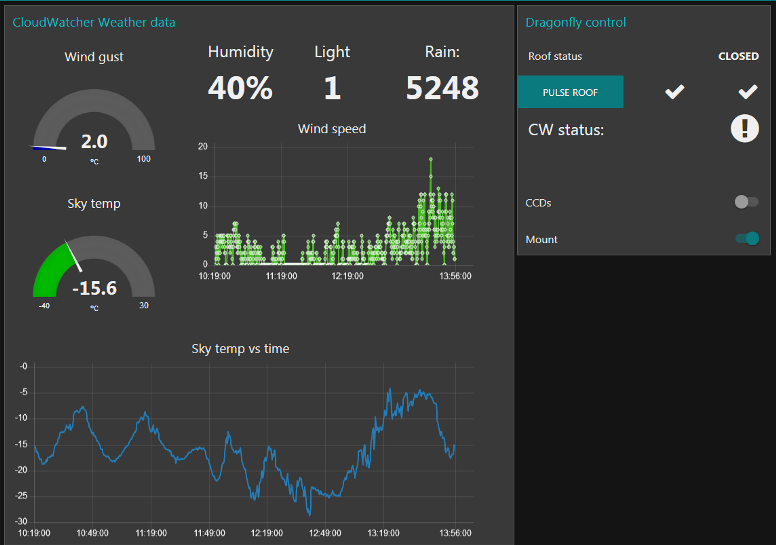
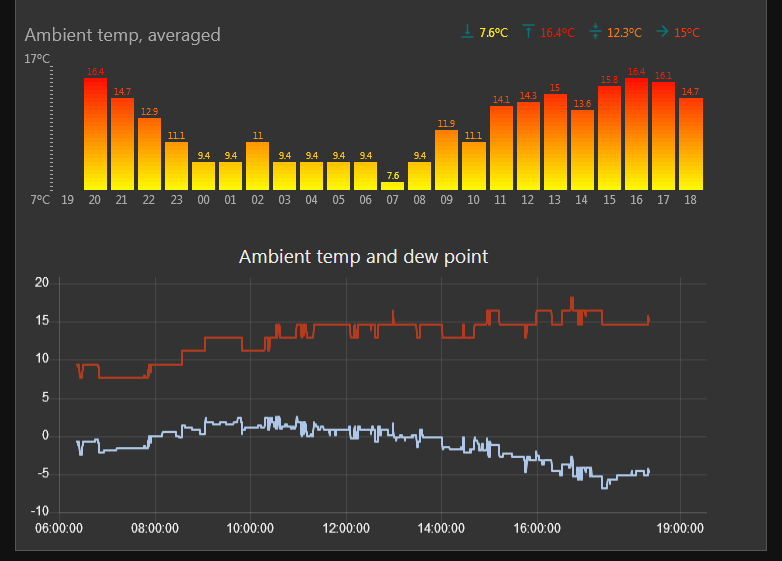
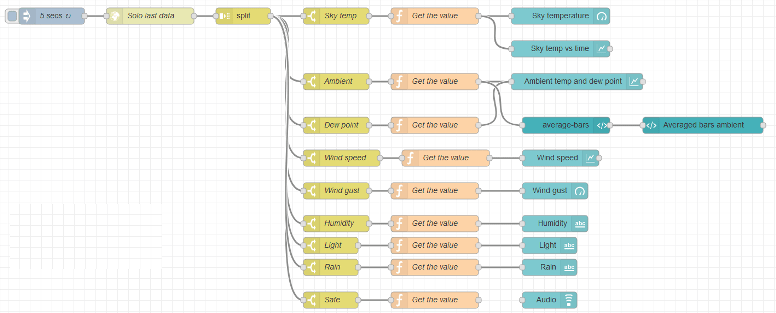
With the sensor data, we just display it in some fancy ways, and in case of roof inconsistency, a big warning is displayed.
What we do with the relay data is to compare it with the saved values from the switches, so, if we close the CCD switch, but the Dragonfly says it is open, a “working” icon is displayed. It both match, a checkmark is displayed. I’ve been unable to place the check side by side with the switch, but decided I’ve had enough! ![]()
So, in conclusion, I’ve liked the process very much, it really allows for integrating information from many sources easily, and make something relatively nice even for someone as blind to design as myself.
Things left for later (I’ll very much welcome any contribution):
- I’d like to be able to change the color of the sky temp chart depending on the temperature (like the clear / cloudy / overcast sections in the Solo graph).
- The humidity / light / rain display should be nicer. Humidity at least change color depending on its value, and for rain and light I’d like to see icons instead of the value.
- In general, I’d like to improve the look of it.